Standardized framework for CAN communication and system-wide fault management within PER vehicles.
canpiler/: Jinja2-based Python module for parsing configurations and generating codeconfigs/: "Source of Truth" definitions for nodes, buses, and system-wide faults.generated/: Auto-generated C files and headers for CAN nodes.dbc/: CAN database (DBC) files for external analysis tools.schema/: JSON schemas for validating configuration files.templates/: Directory containing Jinja2 templates for all generated build artifacts. Decouples the output formatting from the generation logic.tests/: Unit tests for both CANpiler and C source code.
Core Files:
source/can_init.c/can_common.h: Bus/peripheral initialization andCAN_init().source/can_rx.c: CAN RX task and the sharedcan_datainstance.source/can_tx.c: CAN TX task and per-peripheral software queues.source/faults_common.c/faults_common.h: System-wide fault management.can_codec.h: Force-inlined helpers used by generated code for signal packing and unpacking.can_library.cmake: CMake integration and node library generation.
Logic
The high-level logic flow of an RX is shown here: 
- Note
- The all RX IRQs push to the same queue rather than having separate queues per peripheral.
The high-level logic flow of a TX is shown here: 
- Note
- The actual implementation of the CAN TX task manages up to 3 separate hardware peripherals at once, each with its own software queue.
Stale Detection
Periodic CAN messages are assigned a deadline of 2.5x their expected period. If a message is not received within the window, it's associated data is no longer valid. 
Usage
- Define your CAN network and global faults in
can_library/configs/using the provided JSON schemas.- Use FDCAN peripherals on G4 and CAN peripherals on F4/F7.
- Add
can_node_<NODE_NAME>toLIBSin your board'sadd_firmware_component(...)call (must match the uppercase node name from CMake). - Include the generated header for your node (e.g.
#include "can_library/generated/PDU.h"/#include "can_library/generated/<NODE_NAME>.h") in yourmain.c. - Initialize the CAN library in your
main.cwithCAN_init(). - Setup CAN tasks in your
main.cusingDEFINE_CAN_TASKS()andSTART_CAN_TASKS().
The most recent rx'd data is available in the can_data struct, which is updated by the CAN RX task. Sending CAN messages is done via the generated CAN_SEND_<message_name>() functions, which enqueue messages to be sent by the CAN TX task.
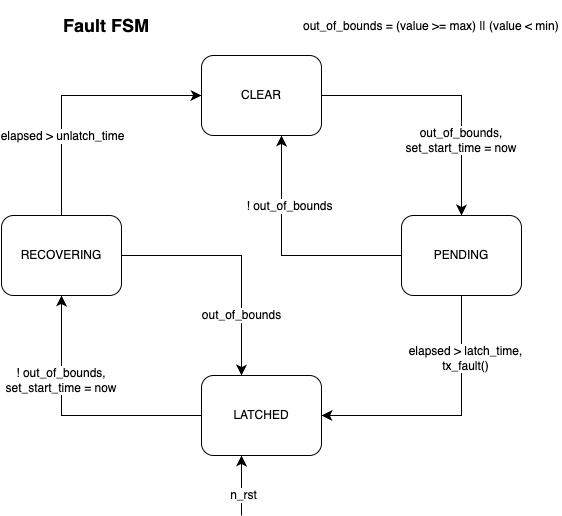
Fault System
The faults_common module implements the FIDR (Fault Isolation, Detection, and Recovery) system. It manages the lifecycle of system-wide faults using a robust Finite State Machine (FSM) to prevent flickering and ensure deterministic fault handling.
Usage:
update_fault(fault_id_t fault_id, float value): Called by the owner node to feed sensor/status data into the FSM.fault_library_periodic(): Tally active faults and calltx_fault_sync(), which broadcasts the node-specific<node>_fault_syncCAN message.is_latched(fault_id_t fault_id): Check if a specific fault is active.is_clear(fault_id_t fault_id): Check if a specific fault is clear.
- Note
- Each node is assigned a specific range of faults (
MY_FAULT_STARTtoMY_FAULT_END). Only the "owner" node can update the state of these faults, ensuring a single source of truth.