The CANpiler is the centralized code generation authority. It handles CAN message generation, fault library, and (soon) daq variable generation.
Software Architecture
Modeled After the traditional compiler pipeline.
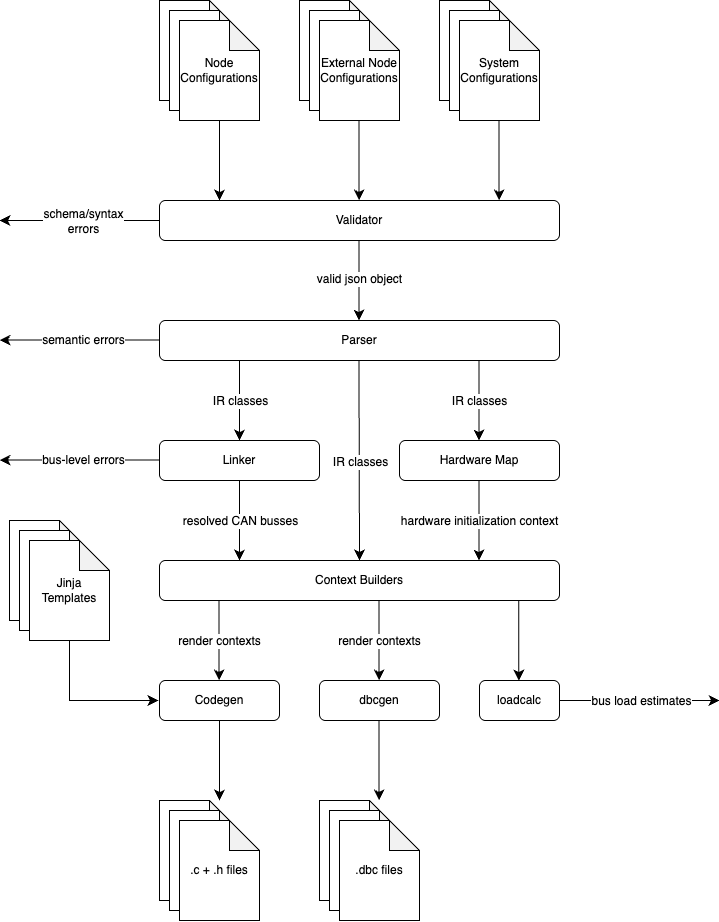
build.py: Main entry point for CANpiler. Coordinates the top-level data flow.
utils.py: Shared helpers (format_float, print_as_success, etc.) used across the pipeline.
1. Schema Validation
validator.py: Catches syntax errors in the configuration files using the jsonschema library (Draft 2020-12 validator).
- typos, missing fields, etc
2. Parsing and Semantic Validation
parser.py: Parses configurations into IR @dataclasses. "Logical" config errors are caught during this phase.
- Invalid types, signals exceeding 64 bits, etc.
- Produces parsed IR consumed by later stages; the unified
SystemContextis assembled bybuild.pyafter linking and mapping.
2.5. Fault Message Injection
faultgen.augment_system_with_faults: Walks each fault-library-enabled node and injects <node>_fault_event + <node>_fault_sync TX messages before linking. This ensures fault messages get IDs assigned alongside everything else.
3. Linker
linker.py: Transforms the IR into a linked IR with resolved message IDs using a two-pass "Water Level" algorithm.
- Pass 1: Constraint Verification: Ensures manual
msg_id_overridevalues respect priority monotonicity (messages in priority $N$ cannot have IDs higher than messages in priority $N+1$). - Pass 2: ID Assignment: Assigns remaining dynamic IDs priority-by-priority.
- Within each priority group, messages are sorted alphabetically by
msg_nameto ensure deterministic builds. - The "Water Level" tracks the next available ID; it incrementially rises as IDs are assigned and skips over reserved override ranges.
- Within each priority group, messages are sorted alphabetically by
- Dependency Resolution: Resolves each RX
msg_nameon the same logical bus as the subscription. Bit-level layout (offsets, shifts, masks) for TX messages is computed earlier in parsing. - Single producer per bus: For each
(bus_name, msg_name)there must be exactly one transmitting node on that bus. Duplicate TX definitions (two nodes, or two entries in one node) fail the build. - Foreign TX for RX: A node may not subscribe on a bus to a message that only it transmits on that bus. Every RX entry requires another node to transmit that
msg_nameon that bus (hardware nodes are not configured to receive their own frames).
4. Mapper
mapper.py: Maps CAN IDs to physical hardware resources.
- bxCAN Filter Groups: Optimizes STM32 bxCAN filter bank usage. It groups messages into 32-bit identifier-mask pairs to maximize throughput while respecting bxCAN's 14 filter banks per peripheral limit.
- FDCAN: Separate paths apply FDCAN SID/XID filter caps (28 SID filters and 8 XID filters in code).
- Promiscuous Mode: Configures all-pass filters for buses where
accept_all_messagesis enabled. - Initialization Code: Generates the bitmasks required for hardware filter initialization.
5. Generation
Produces the final build artifacts from the SystemContext using the Jinja2 templating engine.
- C23 Standard: All generated code targets the C23 standard, specifically utilizing
static constexprfor type-safe constants and identifiers. - Templates (
../templates/):bus_header.h.jinja,can_router.h.jinja,can_types.h.jinja,fault_data.c.jinja,fault_data.h.jinja,filter/bxcan.c.jinja,filter/fdcan.c.jinja,node_header.h.jinja, plus sharednode/partials. codegen.py: Generatescan_types.h, per-node headers (<NODE>.h), per-bus headers, and the centralcan_router.hfrom the Jinja templates. Packed bit-field structs, endianness-safe accessors, and hardened sign-extension for signed signals.dbcgen.py: Produces deterministic, versioned DBC files using thecantoolslibrary.faultgen.py: InjectsFAULT_SYNCandFAULT_EVENTmessages into node configurations and generates global fault tracking maps (fault_data.c/fault_data.h).
6. Analysis
load_calc.py: Performs post-generation capacity analysis for each bus in the system.
- Frame Estimation: Calculates total bits per frame based on protocol overhead (Standard: 47 bits, Extended: 67 bits) and signal DLC.
- Bit-Stuffing: Applies a $1.2\times$ factor to account for average bit-stuffing overhead.
- Health Monitoring: Reports estimated bus utilization percentage with color-coded alerts (Green < 50%, Yellow < 70%, Red > 70%).