Loading...
Searching...
No Matches
PER CAN Library
Standardized framework for CAN communication and system-wide fault management within PER vehicles.
canpiler/: Jinja2-based Python module for parsing configurations and generating codeconfigs/: "Source of Truth" definitions for nodes, buses, and system-wide faults.generated/: Auto-generated C files and headers for CAN nodes.dbc/: CAN database (DBC) files for external analysis tools.schema/: JSON schemas for validating configuration files.
Core Files:
can_common.h / .c: Shared hardware abstraction and logic.faults_common.h / .c: System-wide fault management.can_library.cmake: CMake integration and node library generation.
Usage
- Define your CAN network and global faults in
common/can_library/configs/using the provided JSON schemas.- Use FDCAN peripherals on G4 and CAN peripherals on F4/F7.
- Add to
COMMON_LIBRARIESof your target:can_node_<node_name>. - Define your RX interrupt handlers to call
CAN_handle_irq(CAN_TypeDef *bus, uint8_t fifo)
- Note
- Weird quirk: we run the CANpiler twice. Once during CMake configuration time and one during build time. This avoids any possibility of building with stale generated files.
Fault System
The faults_common module implements the FIDR (Fault Isolation, Detection, and Recovery) system. It manages the lifecycle of system-wide faults using a robust Finite State Machine (FSM) to prevent flickering and ensure deterministic fault handling.
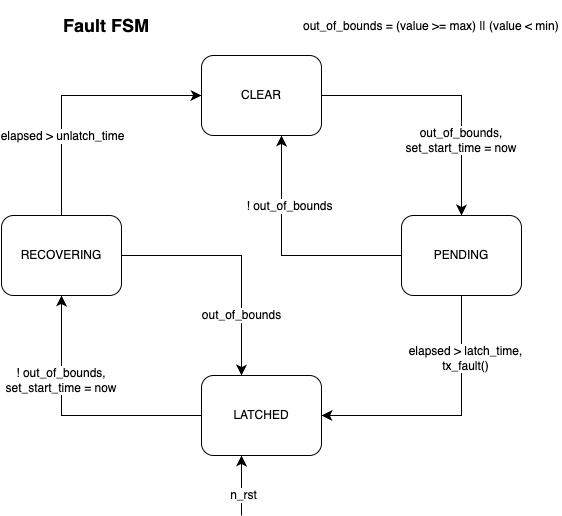
Fault FSM Diagram
Usage:
update_fault(fault_index, value): Called by the owner node to feed sensor/status data into the FSM.fault_library_periodic(): Tally active faults and broadcast atx_fault_syncmessage.is_latched(fault_index): Check if a specific fault is active.
- Note
- Each node is assigned a specific range of faults (
MY_FAULT_STARTtoMY_FAULT_END). Only the "owner" node can update the state of these faults, ensuring a single source of truth.