PER Firmware
Loading...
Searching...
No Matches
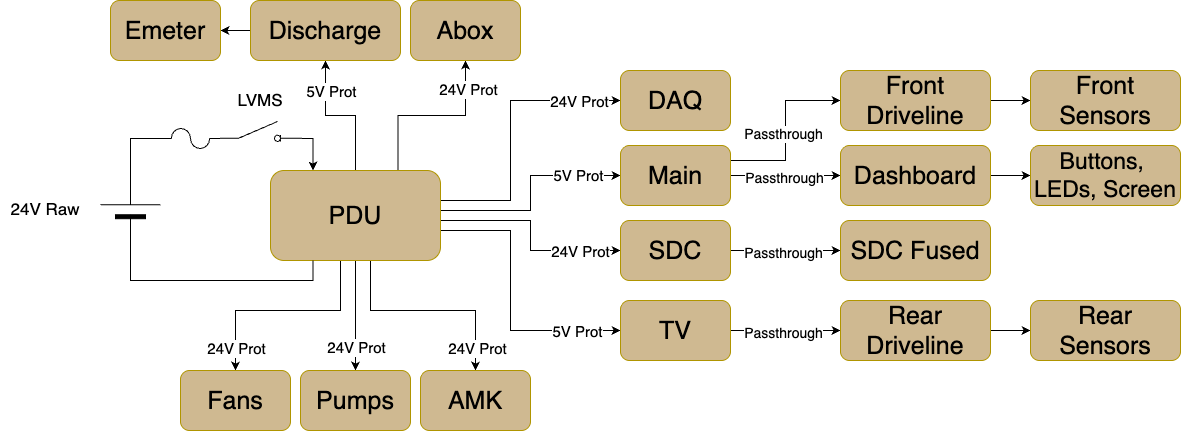
PDU
PDU controls and monitors low-voltage power rails and cooling hardware for the car.
power rails
Generated by
1.12.0